解説
慣れていないと面食らうかもしれませんが、選択肢が少ないことから冷静に解いていけばある程度は拾える問題かと思います。
アドミタンス行列\(\dot{Y}\)
正解 (イ)
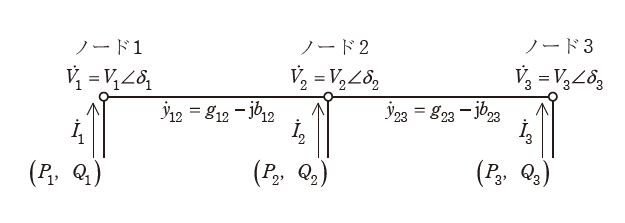
それぞれの電流について考えます。電流は各ノードの電位差とアドミタンスの積なので
$$\begin{aligned}
\dot{I}_1 &= \dot{y}_{12}\left( \dot{V}_1 - \dot{V}_2 \right) \\
&= \dot{y}_{12}\dot{V}_1 - \dot{y}_{12} \dot{V}_2
\end{aligned}$$
$$\begin{aligned}
\dot{I}_2 &= \dot{y}_{12}\left( \dot{V}_2 - \dot{V}_1 \right) + \dot{y}_{23}\left( \dot{V}_2 - \dot{V}_3 \right) \\
&= -\dot{y}_{12}\dot{V}_1 + \left( \dot{y}_{12} + \dot{y}_{23} \right) \dot{V}_2 - \dot{y}_{23} \dot{V}_3
\end{aligned}$$
$$\begin{aligned}
\dot{I}_3 &= \dot{y}_{23}\left( \dot{V}_3 - \dot{V}_2 \right) \\
&= - \dot{y}_{23} \dot{V}_2 + \dot{y}_{23}\dot{V}_3
\end{aligned}$$
これらを行列の形式 \( \begin{bmatrix} \dot{I}_1 \\ \dot{I}_2 \\ \dot{I}_3 \end{bmatrix} = \dot{Y} \begin{bmatrix} \dot{V}_1 \\ \dot{V}_2 \\ \dot{V}_3 \end{bmatrix} \) に整理すると以下のようになります。
$$\begin{aligned}
\dot{Y} &= \begin{bmatrix} \dot{y}_{12} & -\dot{y}_{12} & 0 \\ -\dot{y}_{12} & \dot{y}_{12}+\dot{y}_{23} & -\dot{y}_{23} \\ 0 & -\dot{y}_{23} & \dot{y}_{23} \end{bmatrix}
\end{aligned}$$
よって答えは(イ)です。
ノード\(i\)に注入される有効電力\(P_{i}\)と無効電力\(Q_{i}\)の定式化
正解 (ホ)
遅れ電力が正なので、ノード\(i\)の複素電力\(\dot{S}_i\)は以下で表せます。
$$\begin{aligned}
\dot{S}_i &= P_i + jQ_i \\
&= \dot{V}_i \overline{\dot{I}_i} \\
\end{aligned}$$
ここで、\(\overline{\dot{I}_i}\)は(1)のアドミタンス行列より以下のように表せます。
$$\begin{aligned}
\overline{\dot{I}_i} &= \sum_{j=1}^3 \overline{\dot{Y}_{ij}}\,\overline{\dot{V}_j} \\
\end{aligned}$$
ノード\(i\)の複素電力\(\dot{S}_i\)から\(\overline{\dot{I}_i}\)を消去します。
$$\begin{aligned}
\dot{S}_i &= P_i + jQ_i \\
&= \dot{V}_i \sum_{j=1}^3 \overline{\dot{Y}_{ij}}\,\overline{\dot{V}_j} \\
\end{aligned}$$
電圧とアドミタンスを極形式にします。
$$\begin{aligned}
\dot{S}_i &= \sum_{j=1}^3 \dot{V}_i \overline{\dot{Y}_{ij}}\,\overline{\dot{V}_j} \\
&= \sum_{j=1}^3 (V_i e^{j\delta_i}) \cdot (Y_{ij} e^{-j\theta_{ij}}) \cdot (V_j e^{-j\delta_j}) \\
&= \sum_{j=1}^3 Y_{ij}V_iV_j e^{j(\delta_i - \delta_j - \theta_{ij})} \\
\end{aligned}$$
問題文に\(\delta_{ij}=\delta_{i}-\delta_{j}\)とありますので、これを用いて整理します。また、オイラーの公式を用いて実部と虚部に分解します。
$$\begin{aligned}
\dot{S}_i &= \sum_{j=1}^3 Y_{ij}V_iV_j e^{j(\delta_i - \delta_j - \theta_{ij})} \\
&= \sum_{j=1}^3 Y_{ij}V_iV_j e^{j(\delta_{ij} - \theta_{ij})} \\
&= \sum_{j=1}^3 Y_{ij}V_iV_j \left\{ \cos(\delta_{ij} - \theta_{ij}) + j\sin(\delta_{ij} - \theta_{ij}) \right\} \\
\end{aligned}$$
これの実部が有効電力、虚部が無効電力なので、\(\dot{P}_i\)と\(\dot{Q}_i\)は以下のように表せます。
$$\begin{cases}
\displaystyle P_i = \sum_{j=1}^3 Y_{ij}V_iV_j\cos(\delta_{ij}-\theta_{ij}) \\
\displaystyle Q_i = \sum_{j=1}^3 Y_{ij}V_iV_j\sin(\delta_{ij}-\theta_{ij})
\end{cases}$$
よって答えは(ホ)です。
ブランチの抵抗成分を無視できる場合の\(\theta_{12}=\theta_{23}=\)
正解 (ル)
(1)で求めたアドミタンス行列より\(\dot{Y}_{12} = -\dot{y}_{12}\)です。
また、抵抗成分は無視できるので、\(\dot{y}_{12} = -jb_{12} \)であり、これらより\(Y_{12} = b_{12} \)となります。
ここから
$$\begin{aligned}
\dot{Y}_{12} &= -\dot{y}_{12} \\
&= -\left( -jb_{12} \right) \\
&= jb_{12} \\
&= jY_{12} \\
&= Y_{12}\angle\dfrac{\pi}{2} \\
\end{aligned}$$
がいえます。
よって\(\theta_{12}=\dfrac{\pi}{2}\)となります。\(\theta_{23}\)も同様です。
以上より、答えは(ル)の\(\displaystyle \frac{\pi}{2}\)です。
\(P_2\)の近似式
正解 (カ)
(2)で求めた式を展開します。
$$\begin{aligned}
P_2 &= \sum_{j=1}^3 Y_{2j}V_2V_j \cos(\delta_{2j} - \theta_{2j}) \\
&= Y_{21}V_2V_1 \cos(\delta_{21} - \theta_{21}) + Y_{22}V_2V_2 \cos(\delta_{22} - \theta_{22}) + Y_{23}V_2V_3 \cos(\delta_{23} - \theta_{23}) \\
\end{aligned}$$
与えられた数値を代入します。\(\delta_{22}\)は位相差がないので\(0\)です。
$$\begin{aligned}
P_2 &= Y_{21}V_2V_1 \cos(\delta_{21} - \theta_{21}) + Y_{22}V_2V_2 \cos(\delta_{22} - \theta_{22}) + Y_{23}V_2V_3 \cos(\delta_{23} - \theta_{23}) \\
&= b_{12} \cdot 1.0 \cdot 1.0 \cdot \cos\left(\delta_{21} - \frac{\pi}{2}\right) + Y_{22} \cdot 1.0 \cdot 1.0 \cdot \cos(-\theta_{22}) + b_{23} \cdot 1.0 \cdot 1.0 \cdot \cos\left(\delta_{23} - \frac{\pi}{2}\right) \\
&= b_{12} \cos\left(\delta_{21} - \frac{\pi}{2}\right) + Y_{22} \cos(-\theta_{22}) + b_{23} \cos\left(\delta_{23} - \frac{\pi}{2}\right) \\
\end{aligned}$$
\( \cos\left(\theta - \dfrac{\pi}{2}\right) = \sin\theta \)なので
$$\begin{aligned}
P_2 &= b_{12} \cos\left(\delta_{21} - \frac{\pi}{2}\right) + Y_{22} \cos(-\theta_{22}) + b_{23} \cos\left(\delta_{23} - \frac{\pi}{2}\right) \\
&= b_{12} \sin\delta_{21} + Y_{22} \cos\theta_{22} + b_{23} \sin\delta_{23} \\
\end{aligned}$$
\( Y_{22} \cos\theta_{22} \)はアドミタンスの実数部を意味していますが、これは問題より無視できるため\(0\)です。よって
$$\begin{aligned}
P_2 &= b_{12} \sin\delta_{21} + b_{23} \sin\delta_{23} \\
\end{aligned}$$
です。これに\(\sin\delta_{12} = \delta_{12}\)、\(\sin\delta_{23} = \delta_{23}\)の近似を代入すると
$$\begin{aligned}
P_2 &= b_{12} \sin\delta_{21} + b_{23} \sin\delta_{23} \\
&\fallingdotseq b_{12} \delta_{21} + b_{23} \delta_{23} \\
\end{aligned}$$
となりますので、答えは(カ)の\(b_{12}\delta_{21}+b_{23}\delta_{23}\)です。
ある機能を有する発電機
正解 (ソ)
GOV:Governor 調速機(回転速度を自動で調整する装置)
LFC:Load Frequency Control 負荷周波数制御
AVR:Automatic Voltage Regulator 自動電圧調整器
GOVもLFCも有効電力を増減させるため、問題にある有効電力の目標値を拘束条件として与えるという記述に合いません。
よって答えは(ソ)のAVRです。
拘束条件
正解 (ツ)
AVRが調整するのは電圧なので、答えは(ツ)のノード電圧の大きさです。
スラックノードが担う役割
正解 (タ)
スラックはゆとりや余白などを意味します。
スラックノードは事前に予測できない送電損失をすべて帳尻合わせとして補償します。
よって答えは(タ)の送電損失です。